Spiacente, questo articolo non è disponibile in inglese. ![]()
This email address is being protected from spambots. You need JavaScript enabled to view it.
Real Time Clock e nuovo Buzzer per lo Z80 by Pino Giaquinto
Quello che cercherò di descrivervi stavolta è frutto del mio amico Piergiorgio: l’implementazione (dal punto di vista HW, ma anche SW) di un modulo RTC basato sul diffusissimo chip DS1302 (con tanto di batteria tampone) ed ‘integrato’ nel nostro sistema Z80 sfruttando le possibilità di espansione offerte dal connettore C della scheda video-grafica LX.529.
Fatta questa premessa, che ritenevo assolutamente doverosa da parte mia, rimbocchiamoci le maniche e passiamo agli schemi elettrici del nostro computer Z80. Come è possibile dedurre studiando attentamente lo schema della video-grafica, i progettisti hanno lasciato ‘liberi’ sul connettore di espansione (sarebbe quello su cui viene montata la scheda ‘figlia’ LX.530) i ‘segnali’ PB2-PB7 corrispondenti ai bit b2-b7 della porta B dello Z80-PIO 2 (vedi IC8 sullo schema della LX.529). Utilizzando appunto tre dei segnali disponibili, ovvero PB5-PB7, Piergiorgio ha realizzato un prototipo perfettamente funzionante di un modulo RTC per Z80-NE ‘appoggiandosi’ alla scheda figlia LX.530, come si può vedere nelle foto che seguono:

|
 |

|
(sottolineo "prototipo" ndr)
Ovviamente è stato necessario scrivere un bel po’ di codice per adattare l’hardware al CPM-3 del DarkStar, ma spiegare questo va oltre quello che è il mio compito, credo e spero che se ne occuperà quanto prima l’autore del progetto in persona ????
In particolare il compito che mi è stato affidato dal buon Piergiorgio riguarda la realizzazione pratica di un piccolo modulo che comprenda il CICALINO (ovvero la scheda figlia LX.530) ed il suo modulo RTC… il tutto montato su un’unica schedina di facile realizzazione e che occupi poco spazio.
Per quanto riguarda la ‘sezione’ RTC, ricordando di aver visto qualcosa presso il mio rivenditore di elettronica di fiducia (piccoli moduli da utilizzare con le schede Arduino), ho deciso da subito di utilizzare un modulo ‘commerciale’ basato, così come previsto nel suo progetto, su DS1302 ma realizzato in tecnologia SMD… e questo per contenere al massimo gli ingombri:
 |

|
Per farvi un’idea delle dimensioni del modulo considerate che la pila è una CR1220 che ha un diametro di 12,5mm e che il passo del connettore SIL è quello classico da 1/10” (ovvero 2.54mm). Su questo minuscolo ed economicissimo modulo c’è tutto e più di quanto occorre per quanto riguarda il discorso RTC, resta quindi da considerare e risolvere ‘solo’ per quanto riguarda i ‘suoni’ di sistema.
Lo schema originale della scheda ‘figlia’ LX.530 (che vi mostrerò subito a seguito), necessaria per generare in particolari condizioni il classico ‘BEEP’ di sistema, prevedeva l’utilizzo di due NE555 configurati rispettivamente il primo (IC1) come multivibratore monostabile (che generava all’occorrenza un impulso della durata t1 di circa 0.1s) ed il secondo (IC2) come multivibratore astabile (che generava, in presenza dell’impulso di cui sopra, un segnale ad onda quadra con frequenza f di circa 1KHz):
 |


In questo caso la mia idea è stata quella di realizzare un piccolo modulo, sempre in tecnologia SMD per ridurre gli spazi, prendendo spunto dal progetto originale da cui ho ‘prelevato’ solo la prima parte (il multivibratore monostabile, mi riferisco sempre a IC1) e che ho utilizzato per pilotare un piccolo BUZZER del tipo ‘attivo’. Questo tipo di buzzer, quando alimentato, emette un tono di frequenza prestabilita (generalmente intorno ai 2KHz) ed In tal modo ho risparmiato anche dal punto di vista del numero di componenti. Infatti, utilizzando un buzzer attivo, non ho avuto bisogno di generare l’onda quadra ed ho risparmiato un NE555 e qualche altro componente passivo!
Il buzzer da me utilizzato è economicissimo, di facile reperimento, può essere alimentato con tensioni di 3-5V ed assorbe mediamente poche decine di mA (quindi il NE555 riesce a ‘sopportarlo’ tranquillamente).
A questo punto, in possesso dei due minuscoli moduli, uno per il BEEP di sistema e l’altro per il RTC… come ‘collegarli’ alla video-grafica? L’idea di una schedina HOST mi è subito piaciuta e nella foto qui di seguito vi mostro il risultato finale del mio lavoro. Le foto saranno sicuramente più esplicative di qualsiasi altra presentazione ‘scritta’. L’idea ci è piaciuta tanto… e spero piaccia altrettanto anche a voi ????
 |
 |
||
 |
 |
(La schedina che si vede a destra è quella relativa all'interfaccia ps/2. ndr)
Nella foto a seguito l’interfaccia tastiera PS/2 e la schedina di espansione BEEP & RTC appena descritta, entrambe montate sulla video-grafica LX.529:

|
Ovviamente renderò disponibili tutte le informazioni necessarie per realizzare questo piccolo ‘lavoro’, compresi i disegni dei due stampati che troverete da subito sul sito del mitico Z80-DarkStar (ovvero qui! ndr).
A presto!
| Il software di gestione è reperibile qui (monitor/bios) e qui (cp/m 3 module). |
Download
| Layout PCB |
|
- Details
Spiacente, questo articolo non è disponibile in inglese. ![]()

Interfaccia Floppy Disk
Portiamo i floppy a 880Kbytes di capacità
Hardware


|

|

|
| La daughter board | Cablaggio ai connettori | Modifiche a IC10 |
Il software
- Details
Spiacente, questo articolo non è disponibile in inglese. ![]()

Interconnettere lo Z80 ed il PC
Questo è il tema: scambiare dati tra i due mondi. Nel mio caso l'esigenza è diventata una necessità nel momento in cui, facendo ripartire il mio Z80 dopo anni, mi sono accorto che i floppy da 5" erano ormai irrimediabilmente rovinati.
La comunicazione seriale è la prima risposta che viene in mente per questa esigenza. Peccato che, al momento, interfacce seriali per lo Z80NE non esistevano (ora si!).
Di conseguenza, la soluzione al problema più immediato e con la necessità di utilizzare l'hardware a disposizione, mi ha indirizzato quasi obbligatoriamente verso l'utilizzo di una comunicazione basata da un lato sull'interfaccia parallela/stampante LX389 e la corrispondente porta parallela del PC dall'altro lato.
Non ci sono altre porte disponibili, la porta stampante sulla video grafica sebbene gestita da uno Z80 PIO (quindi perfettamente bidirezionale), purtroppo è abbinata ad un line driver 7407 che ne blocca la funzionalità in input.
Hardware
La LX389 è una schedina mezza altezza, molto simpatica, progettata da Nuova Elettronica con l'intento di permettere il collegamento di una stampante allo Z80, una parallela Centronics per la precisione.
Ma la buona NE ha comunque predisposto la scheda affinche su di essa, in alternativa alla porta stampante, fossero disponibili due porte parallele entrambe utilizzabili come input e/o come output. Il tutto utilizzando quattro buffer-latch e altri quattro logiche per l'indirizzamento della scheda sul bus.
L'unica "pecca" per così dire di questa progettazione è che le due porte hanno ognuna i pin di input e quelli di output separati, mentre per il collegamento con il PC occorre una porta realmente bidirezionale, una porta cioè dove i pin possano svolgere a comando sia la funzione di input che quella di output.
Prima di procedere con la parte Z80 vediamo cosa ci aspetta dal lato PC. Premesso che qui i requisiti importanti sono due:
- La disponibilità della porta parallela, requisito non scontato visto che i PC più moderni non la montano più di default. Occorre quindi un PC dove se anche la porta non disponibile nativamente sia possibile aggiungerne una.
- La porta in questione deve essere bidirezionale. Esistono diverse logiche di funzionamento: SPP, Bidir, EPP, ECP. Tutte sono ok tranne la SPP che NON è bidirezionale. Bisogna anche verificare che da setup del BIOS la porta sia effettivamente impostata come EPP/ECP.
La porta parallela del PC
La porta in questione è sempre abbinata ad un connettore a vaschetta da 25 poli con questa piedinatura

e controllata da tre registri, accessibili sequenzialmente da un indirizzo base

Riassumendo la funzionalità dei pin in una tabella:
|
|
Il controllo dei vari pin, in Linux, è possibile in tre diverse modalità, ognuna con dei pro e contro. Per una introduzione al problema ma sotto Windows potete leggere qui.
- Raw i/o
In questo caso si accede direttamente all'hardware dei tre registri coinvolti. E' il metodo più semplice e veloce, ma dovendo accedere a così basso livello è necessario avere in privilegi del superutente "root". E' anche possibile impostare l'eseguibile che utilizza la parallela come setuid(0) per semplificarne l'utilizzo.
Ora, i puristi della security, obietteranno immediatamente che questo crea dei problemi (di sicurezza appunto) e che quindi è altamente sconsigliabile. Cosa del tutto vera.
Ma, nel nostro caso, stiamo parlando di una applicazione destinata a girare su un sistema non pubblico, da "laboratorio" e quindi possiamo tranquillamente ignorare la cosa nelle giuste condizioni. - Accesso alla device /dev/lpx
Forse il più corretto da un punto di vista formale, ma lento e in ultima analisi abbastanza macchinoso. - Via ppdev driver
Probabilmente il migliore dei tre. Non veloce come l'accesso raw (ma sempre a velocità luce rispetto ad uno Z80) però lavora in user space e quindi non crea problemi di sicurezza. La programmazione avviene tramite una serie di chiamate ioctl(), vedi qui e qui per approfondire.
Come vedremo nella parte software, attualmente ho utilizzato il metodo raw i/o ma, con un pò di calma, le future versioni passeranno all'utilizzo di ppdev.
La parallela dello Z80 - funzionamento
Ok, preparatevi a scaldare il saldatore, ma prima vediamo cosa vogliamo realizzare.
Come anticipato la LX389 mette a disposizione due porte parallele dove però ognuna di esse ha i pin di input e output separati. L'idea è collegare insieme, su una delle due porte, gli 8 pin di input e i relativi 8 di ouput. Quindi dai 16 pin iniziali ne otterremo 8 che possono switchare tra le due modalità ingresso/uscita. Chiameremo questa: data port.
La porta rimanente che chiameremo control port avrà assegnate due importanti funzionalità: un pin in uscita andrà a controllare il chip enable della data port (IC5) quindi funzionando come selettore della modalità i/o della porta stessa.
La seconda funzionalità sarà quella di controllore dei segnali di handshake con il PC collaborando con la porta dati al trasferimento delle informazioni. A questo scopo utilizzeremo due pin in output e due in input.
La scelta di avere due pin di handshake per lato è dovuta al fatto che la differenza di velocità tra i due sistemi è veramente notevole, e, più e moderno il PC utilizzato, più questo gap prestazionale si allarga. Quindi i sistemi per ogni byte trasferito asseriscono prima un segnale di READY, ovvero dato disponibile sulla porta, e poi attendono dal corrispondente una segnale di AKNOWLEDGE prima di intraprendere una nuova operazione. Questo rallenta un pò le performance ma elimina la maggior parte degli errori (e nel protocollo logico è inserito anche un CRC per ulteriore sicurezza).
E passiamo allo schema elettrico, perfettamente riprodotto dall'amico Pino Giaquinto (*)

In questo modo è facile rilevare le differenze rispetto allo schema originale sulla rivista numero 73 di Nuova Elettronica.
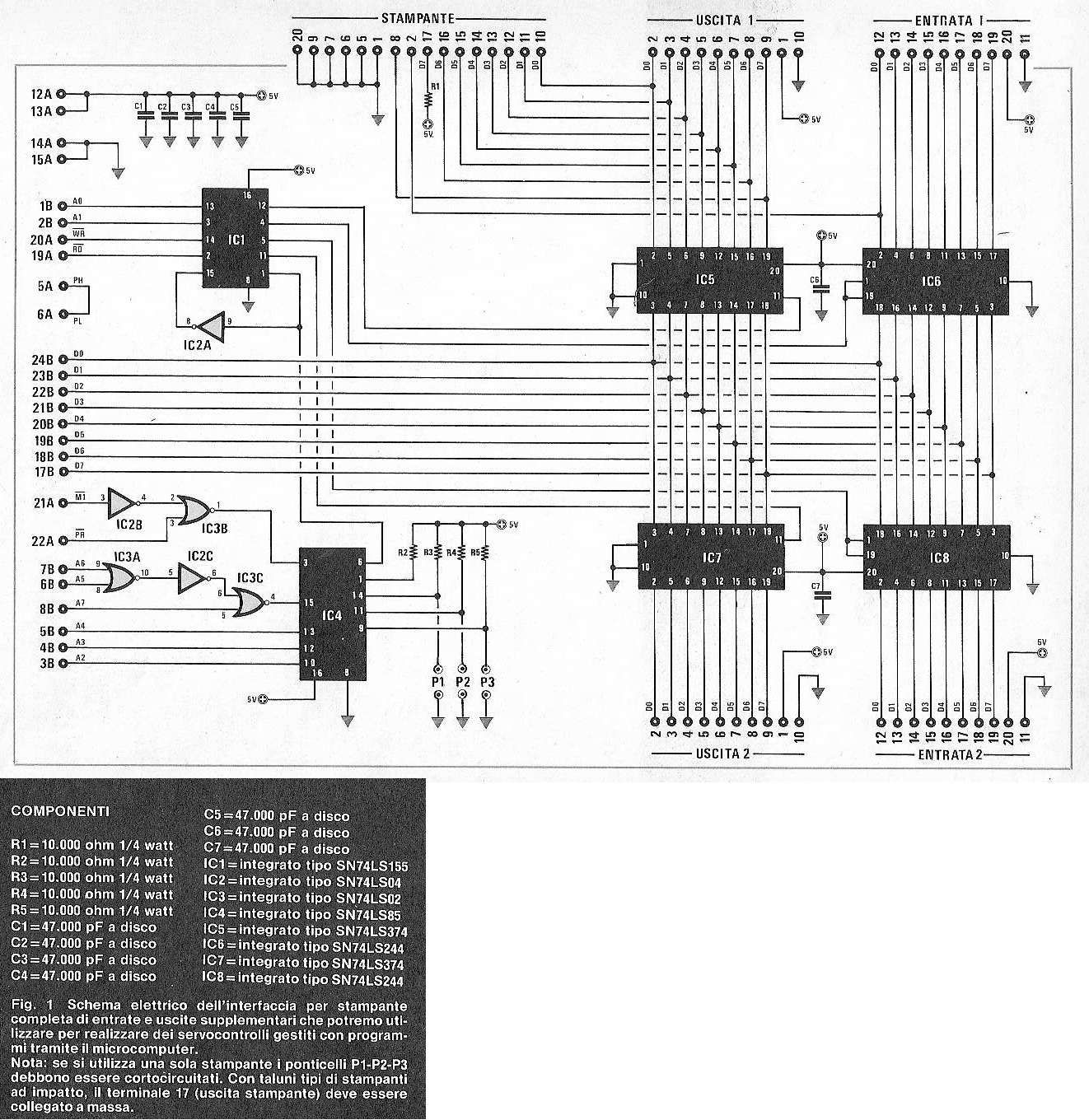{kind=link}
In sostanza IC5 e IC6, che sono la porta 1 della LX389, vengono accoppiati bit a bit per ottenere la data port, il pin 1 di IC5 è scollegato dalla massa e collegato al pin 2 di IC7 a controllare la direzione della data port. IC7 e IC8 sono la porta 2 della LX389.
IC6 come ingresso è sempre attivo sul bus dati della parallela mentre IC5, che è in output si trova normalmente in alta impedenza e forza i dati sul bus parallelo solo quando il pin 1 si trova a zero, pilotato a come detto da IC7, pin 2 (D0).
Ora bisogna accoppiare le due porte PC <> Z80 in modo che possano scambiarsi dati. Il cablaggio relativo è il seguente:

La parallela dello Z80 - realizzazione
La realizzazione dell'interfaccia non è affatto complessa. La maggior parte del lavoro consiste nel cablaggio ovvero nel prelavare i segnali dai connettori CONNETTORE 1 e CONNETTORE 2 della LX389 e questo (a parte realizzare correttamente i collegamenti da punto a punto) lascia molto spazio alla fantasia e alla capacità di ognuno.
L'unica modifica che risulta effettivamente sulla LX389 è tagliare la pista di massa al pin 1 di IC5 e collegarlo al pin 2 di IC7.
Per capire meglio, torna ancora un volta utile l'aiuto dell'amico Pino. La mia realizzazione e la sua sono completamente differenti, benchè funzionalmente identiche e, come al solito, quella di Pino è decisamente più ordinata.
Qualche foto, penso, vale più di mille parole. Cliccate sulla foto per vederla ingrandita.
Le foto a sinistra sono l'implementazione originale, quelle a destra la reinterpretazione di Pino Giaquinto:

|

|
| Modifica pin 1 di IC5 | Modifica pin 1 di IC5 + trasferimento segnali alla porta stampante |
Il motivo per cui nella foto di destra i segnali di handshake sono portati al connettore della stampante è perchè in questo caso viene utilizzato proprio quel connettore per collegarsi al PC. Nel mio caso invece la soluzione è diversa (si lo so, è un pò incasinata, ma devo precisare che è anche la realizzazione prototipo), ovvero:

|

|
| Il prototipo | L'ottimizzazione |
Nel primo caso si è utilizzata una piccola basetta millefori con montati 3 connettori, due che vanno ad inserirsi sulla LX389 ed uno al centro (in foto non si vede) da cui parte il cavo parallelo. Le connessioni quindi sono tutte filate sulla basetta stessa.
Nel secondo caso invece, il collegamento al PC parte dalla porta stampante, i segnali di handshake sono filati dal lato saldature e l'accoppiamento dei bit dati tra IC5 e IC6 è ottenuto con un piccolo flat inserito nel CONNETTORE 1 in alto a destra.
L'ultimo accorgimento di cui bisogna tenere conto e l'indirizzamento della LX389. La data port ha indirizzo 03H e la control port 02H.
Di conseguenza i ponticelli P1,P2 e P3 della scheda devono essere tutti chiusi.

|
| Ponticelli LX389 |
Software
Naturalmente senza una adeguato software di gestione dei trasferimenti quanto sopra sarebbe del tutto inutile.
Ci sono due parti da considerare, ciò che va installato su PC e la naturale controparte sullo Z80. Della parte sullo Z80 ce ne possiamo occupare dopo aver visto il lato PC, perchè, per quanto riguarda lo Z80 è necessaria una piccola digressione sullo stato attuale delle cose.
Il PC, server per lo Z80
Quanto sviluppato fa riferimento al mondo Linux, dovuta premessa, ed è sviluppato in C. Detto questo, il porting sotto Windows è senz'altro possibile ma le routine di gestione della porta parallela sono tutte da rifare, in special modo per ambienti Vista/Windows7/Windows10 dove l'accesso diretto all'hardware non è possibile.
Nel nostro caso invece si è utilizzato la gestione della porta via raw i/o cosa che richiede, come detto precedentemente, i privilegi di root. Questa e altre problematiche sono in corso di risoluzione (vedi Todo più avanti).
Altra premessa è che il software per lo Z80 è scritto per il CP/M e quindi compatibile con il SONE (vedi Todo), niente NEDOS. La gestione del NEDOS è rimandata ad un secondo momento, principalmente perchè non sono ancora a conoscenza del meccanismo dei drivers su questo s.o., peraltro uguale al TRS-DOS (o NEWDOS nello specifico).
Tornando al punto, esistono tre utility per il trasferimento tra Z80<>PC, due dedicate al traferimento diretto send_Z80DS e receive_Z80DS che come i nomi suggeriscono, effettuano rispettivamente invio verso lo Z80 e ricezione dallo Z80 di file e/o regioni di memoria.
Il pezzo "forte" però è un server per dischi virtuali che opera, appunto, attraverso la parallela chiamato vdsk_server.
Il vdsk_server ha diverse caratteristiche di cui le principali:
- Gestione floppy in formato .IMG/.DSK accessibili come da cpmtools tramite la definizione del formato disco.
- Gestione floppy in formato .DMK, utilizzato anche da Roberto Bazzano per l'archiviazione del software su www.z80ne.com.
- Gestione floppy in formato .IMD, che, come sopra, viene utilizzato da Roberto Bazzano per l'archiviazione del software.
- Accesso trasparente in lettura/scrittura per lo Z80 alle immagini floppy.
Ho usato il termine floppy ma in realtà sarebbe più appropriato "volume" in quanto le immagini possono essere anche relative ad HD.
Utilizzo:
> sudo ./vdsk_server -h
ZDS - Z80NE Virtual Disk Server v1.8
Usage: vdsk_server [-zZ] [-f A:format] [-F B:format] [-b boot] [-L label] [-n base] image [image2]
Options:
-z No skew for drive A:
-Z No skew for drive B:
-c Create image for for drive A: if not exist
-L
-b
-f
-F
-n
-h Usage help (this)
-u Dump sectors during transfer
-D DMK mode for non CP/M images (NE-DOS/NEWDOS/other)
-I IMD mode for non CP/M images (NE-DOS/NEWDOS/other)
-p
Disk parameters for DMK create density:heads:tracks:sectors:sec. size:skew factor
where:
d 0 = FM, 1 = MFM
h 1 = SS, 2 = DS
t # of tracks per side
s # of sectors per track
z Sector size in bytes 128/256/512
k skew factor
Il server suporta due immagini disco. nativamente, in formati distinti se richiesto. Gli identificativi dei dischi devono essere successivi ad esempio A:, B: fino a O:, P: Al momento però le opzioni per il doppio disco si applicano solo al formato .IMG/.DSK. Per i formati .DMK e .IMD al momento si può usare un solo disco (immagine).
Inoltre la gestione dei .DSK è limitata a dischi CP/M. I formati dei dischi sono specificati in un file esterno "diskdef" esattamente come per cpmtools (vedi più avanti).
Le opzioni nel dettaglio:
| -z |
Non applica skew factor. I settori vengono letti sequenzialmente come fisicamente presenti sul disco. |
| -Z |
Come sopra, ma per il second disco (solo .DSK) |
| -c |
Richiede la creazione di una immagine. Per il formsto .DSK l'immagine viene creata nel formato specificato con -f, per le immagini .DMK e .IMD occore utilizzare l'opzione -p. |
| -L |
etichetta |
| -b |
Utiizzata con -b |
| -f |
Formato diskdef da utiizzare per l'immagine del primo disco (solo .DSK) |
| -F |
Formato diskdef da utilizzare per l'immagine del secondo disco (solo .DSK) |
| -n |
Base di rinumerazione dei drive. Ad esempio -n C significa che all'immagine disco verranno asseganti i drive C: per il primo e D: per il secondo (max P) |
| -h |
Testo di help |
| -u |
Mostra il dump (esadecimale) del settore in trasferimento |
| -D |
Attiva la modalità per immagini in formato .DMK |
| -I |
Attiva la modalità per immagini .IMD |
| -p |
Parametri del disco utilizzati per la creazione di immagini in formato .DSK/.IMD con l'opzione -c. Esattamente occorre specificare una stringa nel formato d:h:t:s:z:k dove: d 0 = FM, 1 = MFMh 1 = SS, 2 = DS t # of tracks per side s # of sectors per track z Sector size in bytes 128/256/512 k skew factor |
Formati disponibili per le immagini .DSK/.IMG
diskdef SONE128
seclen 128
tracks 40
sectrk 17
blocksize 1024
maxdir 32
skew 4
boottrk 3
os 2.2
end
diskdef ZDSdos
seclen 256
tracks 40
sectrk 10
blocksize 1024
maxdir 32
skew 0
boottrk 0
os 2.2
end
diskdef ZDS
seclen 512
tracks 160
sectrk 11
blocksize 2048
maxdir 256
skew 4
boottrk 2
os 3
end
diskdef ZDSHD8
seclen 512
tracks 64
sectrk 256
blocksize 2048
maxdir 1024
skew 0
boottrk 1
os 3
end
I vari formati sono disponibili nel file vdsk_server/diskdefs.
Le routine per lo Z80
Ovviamente anche il nostro bravo Z80NE va "istruito" sull'uso della parallela.
Le routine riportate di seguito non sono necessarie se decidete di utilizzare la multifunzione perchè sono tutte già integrate sul monitor della stessa e quindi anche nel CP/M3.
Il codice è riportato qui per due ragioni: per conoscenza e perchè ancora non avuto tempo di integrarle nel SONE. Se qualche volontario si offrisse...
Non mi vorrei ripetere, ma mi ripeto, ricordando che le routine riportate qui non sono necessariamente all'ultima versione. Fate sempre riferimento a github invece.
Qui il codice di basso livello:
- Definizioni globali
- Trasferimento dati
Per chi volesse cimentarsi nell'implementare il tutto sul SONE ecco qui l'occorrente:
- Definizioni globali
- Trasferimento dati
- DPB (Disk Parameter Block) per CP/M 2
- Pacchetto compilazione SONE
Per compilare il SONE, modificato o no, è sufficiente eseguire:
> ./makecpm.sh xx
dove xx indica il taglio di ram disponibile (48/56/60/62). In github il tutto si trova nella cartella "software/SONE/sone".
Sono necessari i tools indicati qui.
Tutto quanto sopra è per l'utilizzo del vdsk_server per l'accesso trasparente ai dischi virtuali, se invece volessimo trasferire il disco montato sul PC direttamente al nostro floppy occorre un utility per lo Z80 chiamata dsktran
Attualmente questa utility è disponibile solo per CP/M ma è in grado di trasferire qualsiasi immagine purchè supportata dal vdk_server e, fisicamente, dal floppy driver. A questo proposito notare, che tutte le opzioni con settori da 512 bytes non sono disponibili se non effettuando alcune modifiche sull'interfaccia floppy.
All'avvio il programma richiede alcune informazioni riguardo il numero di tracce/settori/formato e quindi inizia il trasferimento del disco sector-by-sector. Notare che selezionando il formato NEDOS viene regolarmente trattata la traccia 17 con gli specifici address mark.
- dsktran (cp/m version)
- dsktran (nedos version)
Esempi di utilizzo
Avvio da disco virtuale. In questo video la console seriale dello Z80 (disponibile sulla multifunzione) è collegata ad un vecchio ma funzionale terminal server Annex e quindi in rete:
Todo list - Cose da fare
- Porting vdsk_server su parport driver
- dsktran versione NEDOS
* Pino, dove trovi la pazienza per queste cose? Ancora grazie per il tuo insostituibile supporto!
- Details
Spiacente, questo articolo non è disponibile in inglese. ![]()
Z80NE
|
|
 |
Mini howtos e soluzioni a problemi comuni |
|
|
Requisiti Software
Perchè tutto funzioni a dovere è necessario che sul vostro PC (Linux) sia installato un insieme minimale di software: Sistema di sviluppo C/C++, git, cmake, zxcc, mzt.
| Sistema di sviluppo C/C++ | |
| openSUSE | $ sudo zypper install -t pattern devel_C_C++ |
| RedHat/Fedora based | $ sudo yum group install 'Development Tools' |
| Debian/Ubuntu based | $ sudo apt-get update && apt-get install build-essential |
| git | |
| openSUSE | $ sudo zypper install git |
| RedHat/Fedora based | $ sudo yum -y install git |
| Debian/Ubuntu based | $ sudo apt-get update && apt-get install git |
| cmake | |
| openSUSE | $ sudo zypper install cmake |
| RedHat/Fedora based | $ sudo yum -y install cmake |
| Debian/Ubuntu based | $ sudo apt-get update && apt-get install cmake |
mzt
mzt, o my z80 tools, è un completo cross-development kit per lo Z80 che comprende assembler, linker e smart disassembler. Si può scaricare da qui: https://z80cpu.eu/projects/78-data-articles/projects/76-mdz80 al fondo pagina, che include anche altre infomazioni utili. Il mio consiglio è di leggere.
Quindi:
| $ tar zxvf mzt-1.0.0.tar.gz |
| $ cd mzt-1.0.0 |
| $ make |
| $ sudo make install |
Se non ci sono errori il tutto verrà installato sotto /usr/local. Fate riferimento alla pagina di download per altre informazioni.
zxcc
ZXCC è un emulatore CP/M 2/3 bidirezionale che consente:
- di utilizzare Hi-Tech C per CP/M come cross-compilatore sotto Unix.
- usare gli strumenti di sviluppo CP/M (MAC, RMAC, GENCOM, LINK) sotto DOS o Unix.
ZXCC è incluso nel repository ZDS per comodità, volendo può essere scaricato da qui, ma per semplicità si fa riferimento alla versione inclusa nel nostro repo git.
Per prima cosa scaricate il repository software, seguendo le istruzioni.
A questo punto eseguite (dalla directory ZDS):
| $ cd support/zxcc |
| $ tar zxvf zxcc-0.5.7.tar.gz && cd zxcc-0.5.7 |
| $ ./configure |
| $ make && sudo make install |
A questo punto zxcc è installato, ma alcune utility (zxc, zxas, zxlibr) necessitano di una installazione particolare di HiTech C che è inclusa nella stessa directory support/zxcc. Fate così (da ZDS/support/zxcc):
| $ tar zxvf cpm.tar.gz |
| $ sudo cp -r cpm /usr/local/lib # se non avete spcificato una diversa directory di base tramite configure |
oppure in /usr/local/lib64 se il vostro sistema è a 64 bit (non è sempre così, nel dubbio effettuate delle prove).
sdcc
Il sdcc è un cross compilatore C. Alcune utility sono sviluppate in questo linguaggio. Quindi:
| openSUSE | $ sudo zypper install sdcc |
| RedHat/Fedora based | $ sudo yum -y install sdcc |
| Debian/Ubuntu based | $ sudo apt-get update && apt-get install sdcc |
That's all.
Download e Update
Il software sviluppato per lo Z80NE fa capo ad un unico repository globale su github. Anche se nelle pagine dei singoli progetti si fa riferimento a numeri di versione specifici per il singolo progetto il download è comunque unico e sempre riferito a github.
Perche questo?
Per due buone ragioni; la prima è che parte del software è dislocata su più subdirectory e spesso comune a più moduli, la seconda è che l'update del repository è il metodo migliore per seguire gli aggiornamenti senza il rischio di perdere nulla.
Come faccio a scaricare il repository?
Il repository si trova a questo indirizzo https://github.com/pbetti/ZDS ed è consultabile tramite browser. La copia locale cioè il download del repository, la prima volta, si ottiene così:
| $ git clone https://github.com/pbetti/ZDS |
Otterrete una directory "ZDS" contenente tutto il possibile e anche l'impossibile ????. Seguite le istruzioni nei vari progetti per accedere al software specifico.
Come aggiorno il repository all'ultima versione?
Niente di più semplice, per le volte successive. Entrate nella directory ZDS e quindi eseguite
| $ git pull origin master |
Ogni volta che eseguite questa operazione la vostra copia in locale del repository è completamente aggiornata.
Importante: Se eseguite delle modifiche in locale, si potrebbe verificare il caso in cui git non esegue l'aggiornamento perchè, appunto, la vostra copia del repository presenta dei cambiamenti per i quali non è stata eseguita una commit e relativo push sul branch origin master (per fare una push occorre avere i privilegi in scrittura a github). Per questo e per semplicità consiglio di duplicare sempre la directory ZDS e quindi lavorare sulla copia. Naturalmente ci sono metodi più sofisticati per risolvere i conflitti di merge tra versioni diverse del software. Se vi sentite abbastanza confidenti o se non è tutto chiaro, .
- Details
Spiacente, questo articolo non è disponibile in inglese. ![]()


La Multifunction Board
Scateniamo la Z80!
Hardware
|
|
|
|
| La daughter board | Cablaggio ai connettori | Modifiche a IC10 |
Il software
- Details